| ���Ź�ҵ4.0ʱ���ĵ����������Ӿ�����������ҵ���������Խ��Խ��Ҫ��Ϊ�����ø����û���ȡ�����Ӿ�����ػ���֪ʶ�����������Ӿ���������ι����ġ���Ϊʲô��ʵ�������Զ����������Ľ�����ȷѡ��ȡ�С��Ϊ��������ƪ�����Ӿ�����ѧϰ���ϡ� �����Ӿ���һ��ѧ�Ƽ������㷺Ӧ��������������ȹ�ҵ����������֤��Ʒ�����������������̣���֪�����ȡ������Ӿ�ϵͳ�ǽ�����ȡĿ��ת����ͼ���źţ�����ר�õ�ͼ����ϵͳ���������طֲ������ȡ���ɫ����Ϣ��ת������ֻ��źţ�ͼ��ϵͳ����Щ�źŽ��и�����������ȡĿ������������������б�Ľ���������ֳ����豸������ 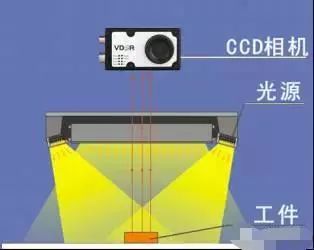
һ�������Ӿ����� �����Ӿ�ϵͳ���и�Ч�ʡ��߶��Զ������ص㣬����ʵ�ֺܸߵķֱ��ʾ������ٶȡ������Ӿ�ϵͳ�뱻�������Ӵ�����ȫ�ɿ��� �˹����������Ӿ��Զ�������Ҫ�����У� 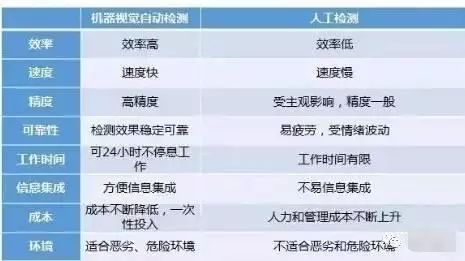
�������� Ϊ�˸��õ���������Ӿ������棬�����������ھ���Ӧ���еļ��ְ����� 01 ơ�Ƴ����õ����Һλ���ϵͳΪ�� 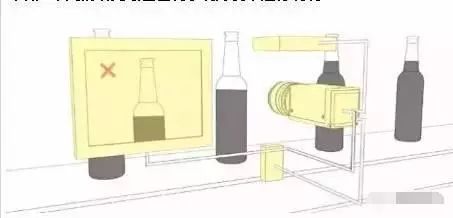
��ÿ��ơ��ƿ�ƶ��������������ʱ�����������ᴥ���Ӿ�ϵͳ����Ƶ���⣬����ơ��ƿ����Ƭ���ɼ���ơ��ƿ��ͼ��ͼ�浽�ڴ���Ӿ��������ᴦ���������ͼ������ơ��ƿ��ʵ�����Һλ����ͨ��-δͨ����Ӧ������Ӿ�ϵͳ��һ��ơ��ƿδ��䵽λ����δͨ����⣬�Ӿ�ϵͳ������ת���������źţ�����ơ��ƿ������������������Ա��������ʾ���ϲ鿴������ơ��ƿ�ͳ���������ͳ�����ݡ� �������Ӿ�������ż��λӦ�� 02 
�ֳ����������̣�����1�����ǰ���ż������2�У�����2�����ǰ���ż�ӷ�����Ϊ���档��Ӧ�ò����������Ӿ�����˾VD200�Ӿ���λϵͳ����ϵͳͨ���ж���ż�����棬����ż�������������ֵͨ�����ڷ��������ˣ��������յ�������˶�ץȡ��Ʒ�����������кܶ���ż���ڷ���ʱ��VD200�Ӿ���λϵͳ���жϷ�����ż��������������ż��������ʱ��VD200�Ӿ�ϵͳ����ָ�������2�ѷ�����ż������档 �ö�λϵͳͨ����ż�����С�����ж���ż�Ƿ������棬�������ż���ĵ����꣬���������ˡ�ͨ��VD200�Ӿ���λϵͳʵ���Զ����ϣ��������˹��ɱ�������������Ч�ʡ� 03 �Ӿ�����ڵ���Ԫ����Ӧ�� 
�˲�ƷΪ���Ӳ�Ʒ�İ�ť��������Ʒ����Ϊ�ϴ�ģʽ���ϴ�����Ϊ˫�Ų�Ʒ��ͨ����ÿ��Ԫ������λ��ʹ���ߵ�������Ʒ�̶�����ĻҶ�ֵ�����жϴ���������ȱ������� ��Ӧ�ò���������**����˾��DragonVision�Ӿ�ϵͳ������ʹ�������������Դ��ϻ�е�豸���ﵽÿ�μ��˫��8����Ʒ��ÿ���Ӽ���Լ1500���������ֲ�Ʒ����ʱ�����̱���ͣ������֤�˲�Ʒ�ĺϸ��ʺ��豸���������У��������Ч�ʡ� �����Ӿ���Ӧ������ 04 ☞ ʶ�� ��һά�롢��ά��Ľ��� ��ѧ�ַ�ʶ��OCR����ȷ�ϣ�OCV�� ☞ ��� ɫ�ʺ�覴ü�� ������������ Ŀ��λ�úͷ�����•���� �ߴ��������� Ԥ������IJ��������λ����λ�ľ��� 
☞ ��е������ ����ռ�����������е�־�ȷ��λ 
���������Ӿ�ϵͳ����� �� ���� 
�� ��� �� ͼ���ȡ����Դ����ͷ��������ɼ�������еƽ̨ �� ͼ���������������������ͼ��������������ͼ���������档 �� �о�ִ�У��紫��Ԫ����е��Ԫ 
01 ��Դ ��1����·ԭ�� ����������ܿ������壬���ǿ�����������淴������Ĺ⡣ ���淴�䣺ƽ�������ԶԶ��Ƿ������ ���䷴�䣺�ֲڱ����Ӹ�������������� ��ɢ���䣺���������������������ƽ�����棬��Թ��߽��з�ɢ���� 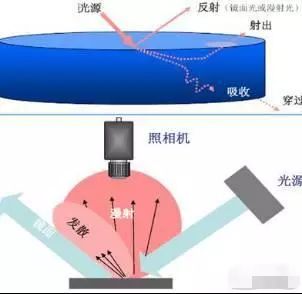
��2�����ú�Ҫ�� �ڻ����Ӿ��е����ã� ����Ŀ�꣬������ȣ� �γ�������ͼ������Ч���� �˷���������Ӱ�죬��֤ͼ���ȶ��ԡ� Ҫ�� ���������Ĺ�����գ� ���õĹⳡ���Ҫ�� �Աȶ����ԣ�Ŀ���뱳���ı߽������� ���������������Ҿ��ȣ�������ͼ������ ����ɫ�йصĻ���Ҫ��ɫ��ʵ���������У������ػ�Ƿ�ء� 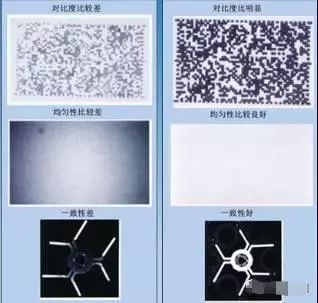
��3���ⳡ���� ���������߷����������� ���������߷����뿪����� 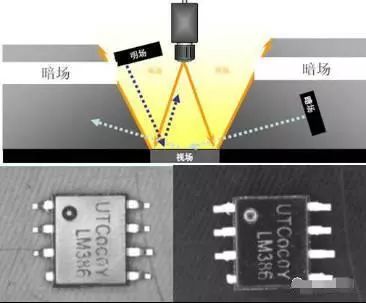
��4�������Դ 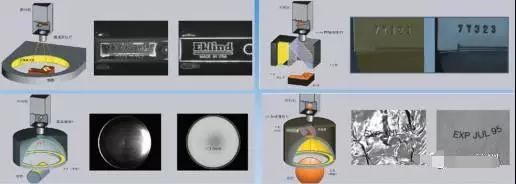
ʹ�ò�ͬ���������Ա���Ŀ��������ͬ��Ӱ�죬�Թ������Ϊ���� 
��ͷ 02 ��1����Ҫ���� ��ҵ�ľ�ͷ���Ƕ��龵Ƭ�����һ��ġ�����ʱ����Ժ�ȶ�����Ӱ�콫���Ч��û�к�ȵIJ���ģ�ͣ����������� ����������/�ӳ�/���/���/��Ȧ/����/�ֱ���/�Ŵ���/����/�ӿ� 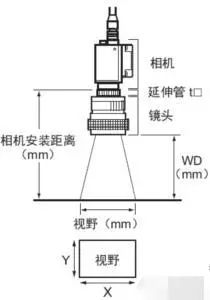
�ֱ��ʣ���ɫ�ʺ������ķֱ������� ���䣺��ͷ�����������������ķŴ�������ͬ�� 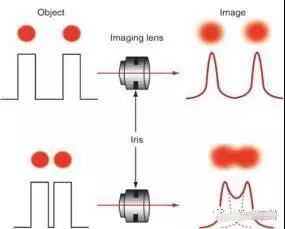
�����У��һ���úڰ����ķ���ͼ�������У����̲������ӡ�һ���������С��2%�����۹۲첻����������С��CCD��һ�����أ������Ҳ�������� 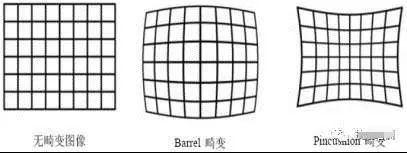
��2����ͷ����-����  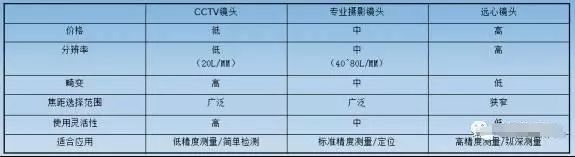
��3����ͷ����-Զ�ľ�ͷ �ڲ���ϵͳ�У���ೣ�����仯���Ӷ�ʹ��߷����仯�����Բ�õ�����ߴ�Ҳ�����仯���������˲�������ʹ����ǹ̶��ģ�Ҳ����ΪCCD���б��治��ȷ��������ƽ���ϣ�ͬ��Ҳ���������������Զ���ᄉ�е���Զ���ᄉ�����������仯�����IJ��������﷽Զ���ᄉ���������CCDλ�ò������IJ����� 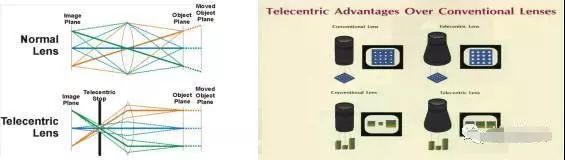
03 ��� ���ࣺ��&�桢��/�𡢺�/�ʡ���/ģ����/�ߡ�CCD/CMOS ָ�꣺��Ԫ�ߴ硢�ֱ��ʡ������С����Ӧ���ߡ���̬��Χ�������ȡ��ٶ�������������ӡ���������������������ȡ� ����ģʽ��Free run��Trigger�����֣�����ʱ���ع�ȡ� ���䷽ʽ��GIGE��Cameralinker,ģ�⡣ 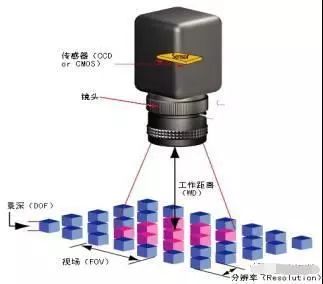
��1�������������ͼ�������� CCD�����ʹ��CCD�й�оƬΪͼ���������,�����ת������ɴ��������ת�ơ��źŶ�ȡ��һ�壬�ǵ��͵Ĺ������������ CMOS�����ʹ��CMOS�й�оƬΪͼ��������� ,������Ԫ���С�ͼ���ź��Ŵ������źŶ�ȡ��·��ģ��ת����·��ͼ���źŴ�������������������һ��оƬ�ϣ������оֲ����صı��������ʵ��ŵ㡣 ��2����������������ͼ����ɫ���� ��ɫ��������ͼ��Ϊ��ɫͼ�������� ��ɫ��������ͼ��Ϊ��ɫͼ�������� ��3���������������ź����� ģ���ź�������Ӵ������д������źţ���ת����ģ���ѹ�źţ�����ͨ��Ƶ�źź��ٴ���ͼ��ɼ����С� �����ź�������ź��Դ������е����������������ڲ�ֱ�����ֻ����������������ְ���1394�����USB�����Gige�����CameraLink����ȡ� ��4������������մ������������� ��ɨ������������������س���״�ֲ��������������ͼ��Ϊ��ά“��”ͼ�� ��ɨ��������������ϳ���״��һ�л����У��ֲ��������������ͼ��Ϊһά“��”ͼ�� ��5���������CMOS VS CCD 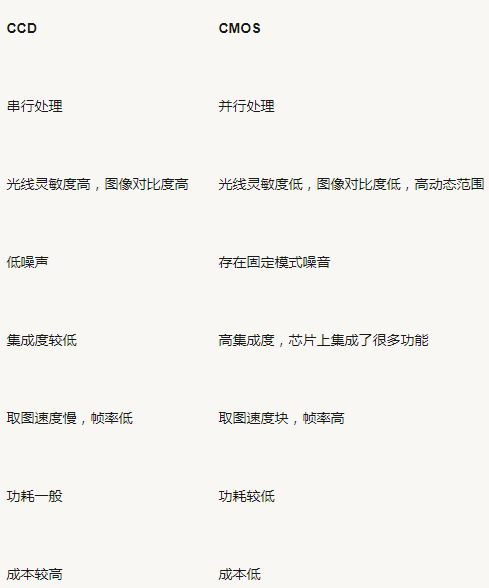
��6����������������ijߴ� ͼ�����й�����������С������ߴ�ֱ�Ӿ���������ϵͳ�������Ŵ��ʡ��磺1/3“��1/2”�ȡ��������ģ������Ĵ������ij���������4��3 (H��V)����������ij���������������֣�1��1��4��3��3��2 �ȡ� 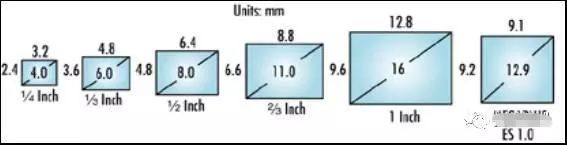
��7������������� �dz��������оƬ��ͼ���*С��ɵ�λ����200�����ص����Ϊ����������1600*1200������,������1/1.8Ӣ���С��CCDоƬ�� 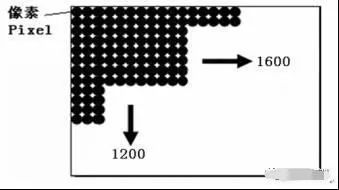
��8����������ֱ��� ����������õ�оƬ�ֱ��ʾ�������оƬ�������е���Ԫ������ͨ����������ķֱ�����ˮƽ�ʹ�ֱ�ֱ����������ֱ�ʾ���磺1920��H��x 1080(V)��ǰ������ֱ�ʾÿ�е���Ԫ������������1920����Ԫ����������ֱ�ʾ��Ԫ����������1080�С� ��9���������֡�ʺ���Ƶ �������֡��/��Ƶ��ʾ����ɼ�ͼ���Ƶ�ʣ�ͨ�����������֡�ʱ�ʾ����λfps��Frame Per second������30fps,��ʾ�����1������*���ܲɼ�30֡ͼ���������ͨ������Ƶ��ʾ����λKHz,��12KHz��ʾ�����1������*���ܲɼ�12000��ͼ�����ݡ� ��10��������������ٶȣ�Shutter Speed�� CCD/CMOS����������õ��ӿ��ţ�ͨ�����ź�����Ŀ��������ƴ������Ĺ���֣��ع⣩ʱ�䡣����һ�����ܵĵ���������ٶȿ��Դﵽ1/10000-1/100000�롣 �������ţ�Rolling Shutter��������CMOSͼ������ʹ�õĿ��ţ��������������ع⣬ÿһ�е��ع�ʱ�䲻һ�¡� ȫ�ֿ��ţ�Global Shutter����CCD�������ͼ�����CMOS���������õĿ��ţ�����������������ͬʱ���ع⡣ 
��11���������������� ���ܹ�ҵ�����һ�ָ߶ȼ��ɻ���С�ͻ����Ӿ�ϵͳ������ͼ��IJɼ���������ͨ�Ź��ܼ����ڵ�һ����ڣ��Ӷ��ṩ�˾��ж�ܡ�ģ�黯���߿ɿ��ԡ�����ʵ�ֵĻ����Ӿ�������������ܹ�ҵ���һ����ͼ��ɼ���Ԫ��ͼ������Ԫ��ͼ��������������ͨ��װ�õȹ��ɡ�����Ӧ����*�µ� DSP��FPGA���������洢�����������ܻ��̶Ȳ�����ߣ���������ֻ����Ӿ���Ӧ������
Ӳ�������Ž���Ⱥ������Ȥ���Լ������ǡ�VX��david329112 ֧������Ӳ��������Ŀ�� ��̫��һ���Բ��ԡ�USB2.0���ԡ�USB3.0���ԡ�MIPI���ԡ�HDMI���ԡ���ͼ���� �������ԡ��Ʋ����ԡ�ʱ����ԡ�DDR���ԡ�CAN/LAN���ԡ�I2C���Ժ�SPI���� ������ԡ��������ԡ�S�������ԡ�WIFI���ԡ��迹���ԡ�����ŵ���� ����Ҫ������ϵ���ǣ� ԭ�����ߣ�������ɭ����Ϣ��������˾ |













